The Frankenstein prototype was successful enough to indicate that the concept is feasible. The next step is to take the learnings and iterate on the next design as well as create new pieces to replace the Frankenstein parts.
New in this build are:
- a motor mount, with a frame to hold the Horizontal Stabilizer
- a single piece Horizontal Stabilizer
- upgraded tread-tracks (version 4)
- new Helix mount for motor spendel
 |
| WildWorm Drive - iterative design (OpenSCAD) |
The Frankenstein prototype was becoming 'stuck' due to two combining factors. An astute YouTube viewer pointed out that the Horizontal Stabilizer was twisting which caused the treads to bind on the helix. In addition, the pin in the Horizontal Stabilizer was crudely glued and would obstruct the rotating helix. The new design uses a single piece Horizontal Stabilizer, pictured above in light blue. In addition, the new motor mount will more tightly secure the stabilizer and position it in line with the centerline of Helix's rotation.
The Tracks have been updated to use a screw as the henge pin between the treads. This design, I hope, will create more fluid motion. It will also be easier to assemble and reduce the failure rate the track becoming disconnected.
 |
| WildWorm - Underside view (OpenSCAD) |
The underside view of the next design iteration shows the base of the motor mount. As you might be thinking, the helix will not be well exposed to ground contact with this design. This is true, it will be addressed in future iterations. For now, I need to verify the easy rotation of the helix. For this, I will need more track links and a smooth stabilizer.
 |
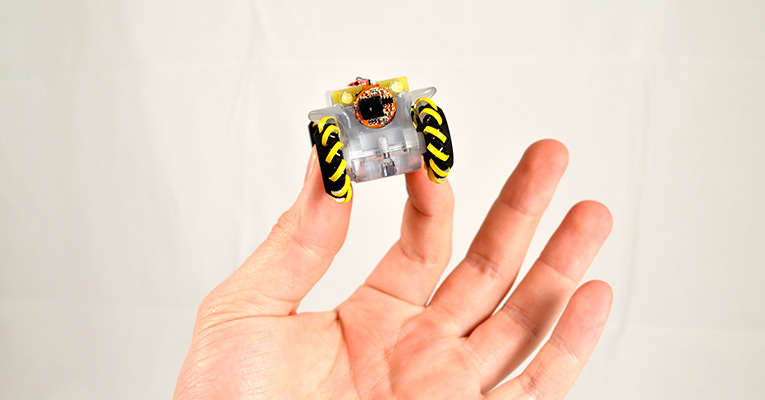
| WildWorm Drive - 3D printed, the new design works much better |
[later today...] I have printed the new design and put it together. The single piece Horizontal Stabilizer was a significant improvement. With a some additional filing on the parts, the WildWorm drive rotates as planned. I will update with a video of the new design.
Finally, for the Robot Lovers out there. Ninety-nine years ago, On January 25th, 1921 the Czech play Rossum's Universal Robots premiered, entering the word 'Robot' into the English Language.