Perhaps it is time for some new perspective after a pause of 2 years. For a "Weekend Project", I decided to re-examine the Centipede design that I had started before. At this time, I have a bit more experience with gears and how to make the daisy-chain of gears that would be necessary for this type of robot. I wanted to verify, with a physical test, how such a mechanism could fit together and if the gear train would have enough torque for it to actually move the robot. For this test, I have learned much more about the potential, and as well as some limitations.
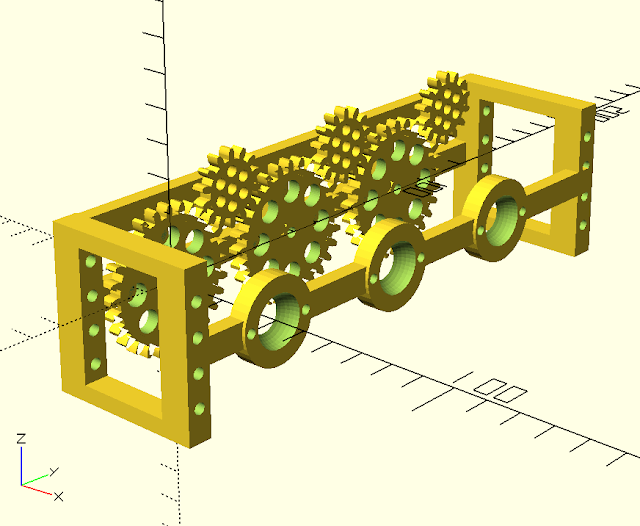 |
| Centipede Robot V4 - Frame and Gears |
I was able to quickly print out the new design. I was able to re use the chopsticks as well as the ball and socket parts. I also had some 3D printed gears already in the works from the Tilt! and Gear-box projects. I am currently satisfied with using the 1.5 modulus for the Gear teeth to radius design. It is larger than 1.0 and much easier to print and start using.
 |
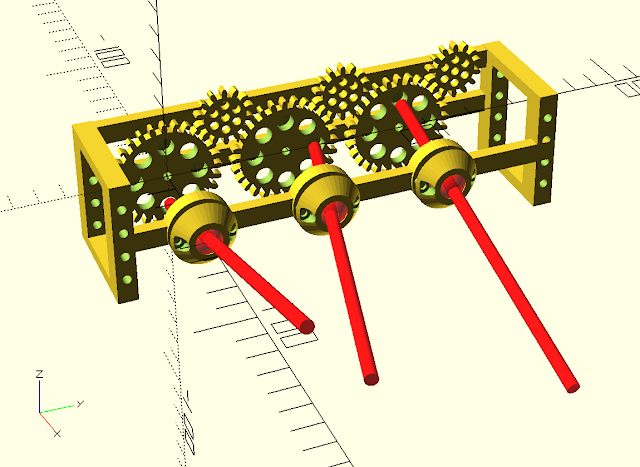
| Assembly of the Prototype |
 |
| Completed Prototype Test frame for Centipede Robot |
Here is the proof of concept constructed and working. At the end, I use a gearbox to drive the prototype. The short video is on my YouTube channel.
Wow, ultimately it could look like this with 18 legs. This would be about 40 cm wide and 50+ cm long (without a head).
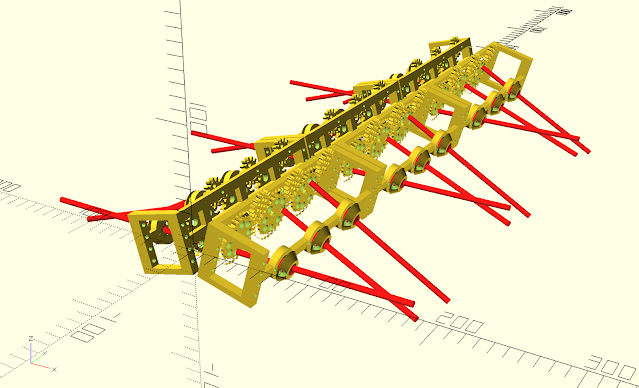 |
| 18 leg Centipede Robot |
So this all seems possible, with a bit more printing and design work. I think for the full version, It would need to have a complete cycle on downlegs.
No comments:
Post a Comment