Background and Inspiration
The most excellent robotic researchers at the Biorobotics Laboratory (BioRob) have been doing incredible research in quadruped robots. BioRob is part of the Institute of Bioengineering in the School of Engineering at the École polytechnique fédérale de Lausanne - EPFL. In 2013, they started publishing their results of their research in dynamic robots using compliant mechanics. This included the Cheetah Cub - a compliant quadruped robot, the size of a house pet.
 |
| Rendered Cheetah Cub - Biorobotics Laboratory, EPFL |
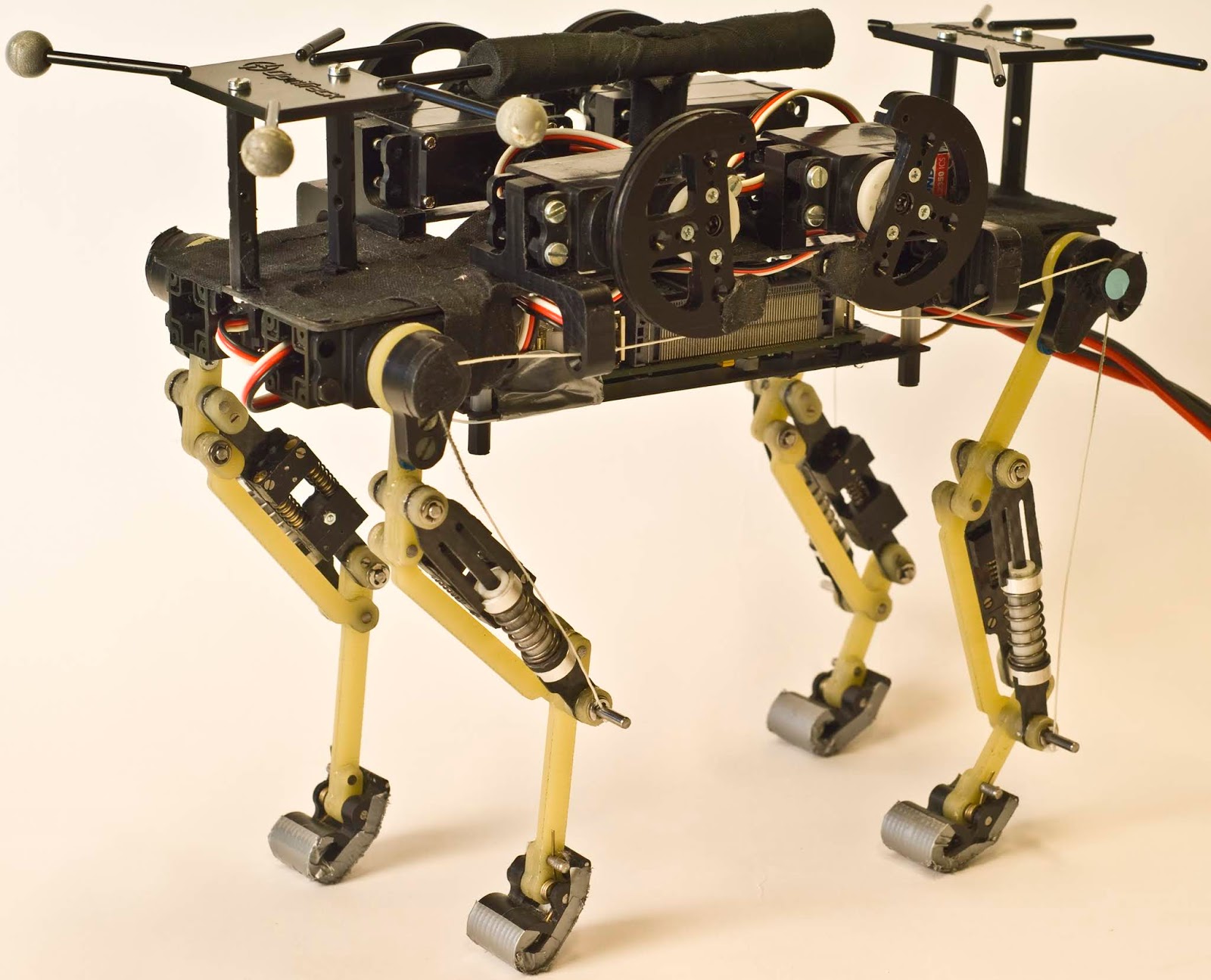 |
| Actual Cheetah Cub - Biorobotics Laboratory, EPFL |
Enter the Maker!
My next project was planned to be a Hexapod robot. But after reading about EPFL - BioRob's success and seeing the OpenCat project, I had enough inspiration to try for the compliant quadruped. Besides, I am really cheap when it comes to buying parts, a Hexapod requires 6x3 = 18 servos and a quadruped like this would only need 4x2 = 8 servos! (in theory). And dynamic is way more exciting than static!
 |
| A static 3D printed Hexapod leg vs the sketches of a compliant leg. |
So, off we go to build Mojo, my compliant quadruped robot dog. With Sketch pad in hand, I started to draw out what I have seen in the EPFL pictures. Paper drawings lead to my OpenSCAD design. Which I created my first draft on the 3D printer. For Mark1, I can only say that 1) "Do It" is achieved - the project is started and 2) It stands, sort-of, kind-of. :)
 |
| Mojo Leg mk1 - it does stand... |
No comments:
Post a Comment