Here are some more details of Mojo4 - Quadruped Robot Dog
NOTE: This is a FRANKENSTEIN Prototype.  it is built mostly with reused 3D printed parts. All of the Dark Green Leg parts were printed so that I could experiment with the 5-Bar design. Everything else is reused or scrap from previous projects. This includes the black frames used to mount the servo motors. My plan is that once this is walking, I will start printing a new chassis with my new-found experiences, also to add the 12DoF. But first this one must walk.
it is built mostly with reused 3D printed parts. All of the Dark Green Leg parts were printed so that I could experiment with the 5-Bar design. Everything else is reused or scrap from previous projects. This includes the black frames used to mount the servo motors. My plan is that once this is walking, I will start printing a new chassis with my new-found experiences, also to add the 12DoF. But first this one must walk.
Here are the pictures:
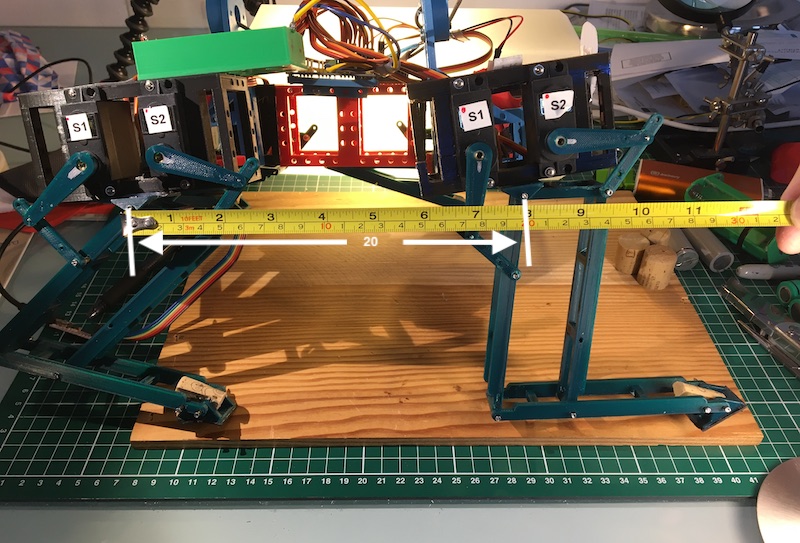 |
| Length - measured from the pivot points: |
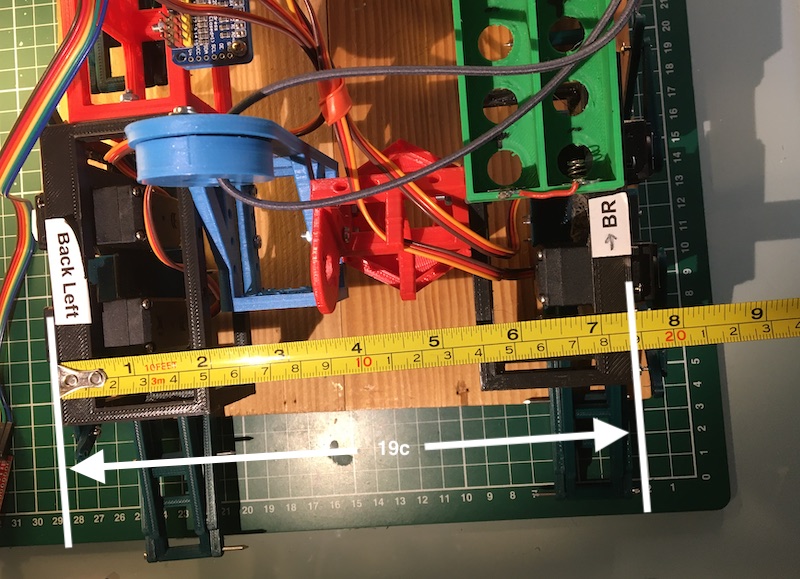 |
| Mojo4 - Width measured on outside legs |
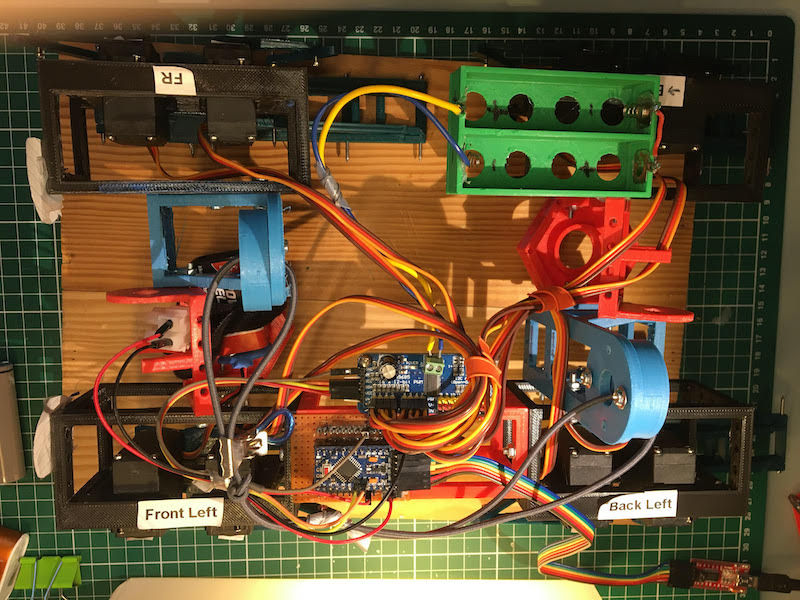
Top - Yes, this collection of PLA is a mess.
Electronics: Arduino Pro Mini clone, PCA9685 servo driver, and battery box.
The 4 servo boxes are on the sides all held together by random parts that fit, bolted together by M3 screws and nuts, some super glue, and hot glue. Somewhere in there is a 9V battery for the microcontroller, there is a small power switch on the mounting board.
Battery Box: 3D printed, for 2x 18650 batteries. I reused the spring contacts from small toys. This is a problem since the spring that I have highlighted with an arrow can not handle the current of the batteries and heats up (to the point of melting the hot glue holding it in place). something else to fix.
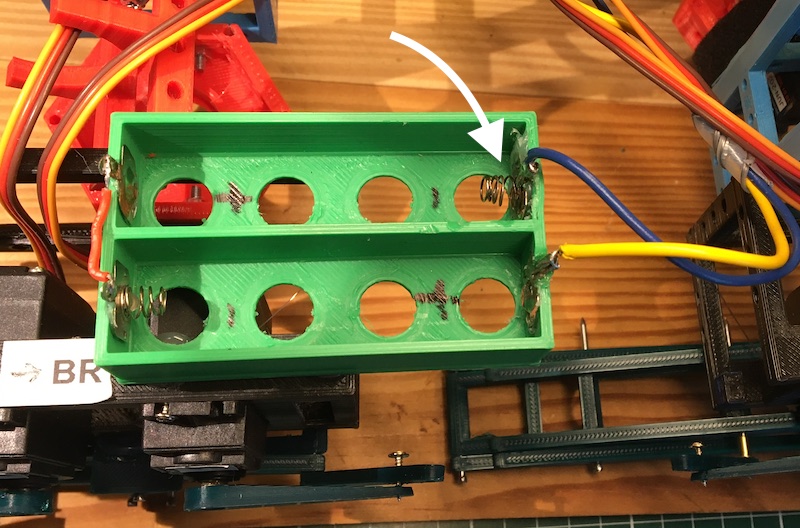 |
| 3D Printed Battery Box for 2x 18650 batteries |
Here is a picture of the leg configuration. 3D printed, minimal material. It has been strengthen (i made it thicker) to prevent bending. The pivot points are small common nails placed into tubular channels in the leg components. a very cheap easy way of making a hinge. The paw needs a new design. the current version is 3D printed, has rubber on the bottom, and part of a wine cork to hold it in place. reuse!
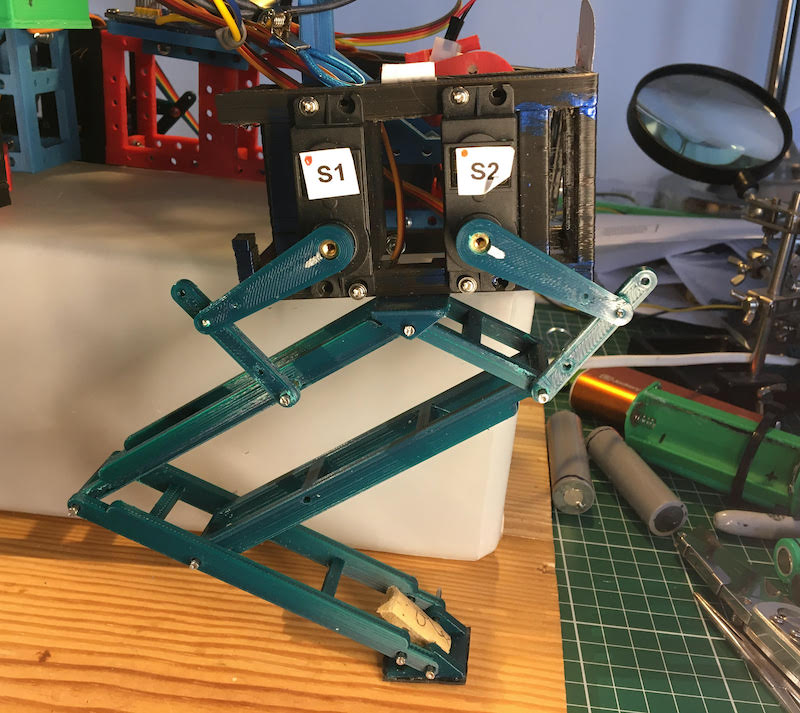 |
| Mojo4 - 5bar quadruped robot leg |
No comments:
Post a Comment