|
| First attempt to test the motor, belt and pulley |
Here is are the parts. I was trying to rig them up to quickly test how much backlash I would get from the old printer motors and belts. However, the axel and wheel were so wobbly that I could not make it work. (In addition, my plans to use a piece of scrap pressed steel to attach the motor are dashed - I do not have the necessary tools to cut large holes in the steel. so back to the 3D printer!!) Also, you will see, I am re-using the printer's belt drive. This is about 70cm in length.
 |
| Wheel, bearing, and axel from an in-line skate wheel |
The design problem is how to use the already dimensioned Axel and Bearings. Since I am reusing this part, I must work around it's length. It is longer than what I will need. In addition to this concern, I will need a way to secure the axel to the base and wheel mount of the Tilt robot. This is not typically a problem with balancing robots that us stepper motors since they have more direct control of the wheel. However, I firmly believe that the weight of the robot should not be directly applied to the motor. Thus I am using bearing and separating the load from the motor.
 |
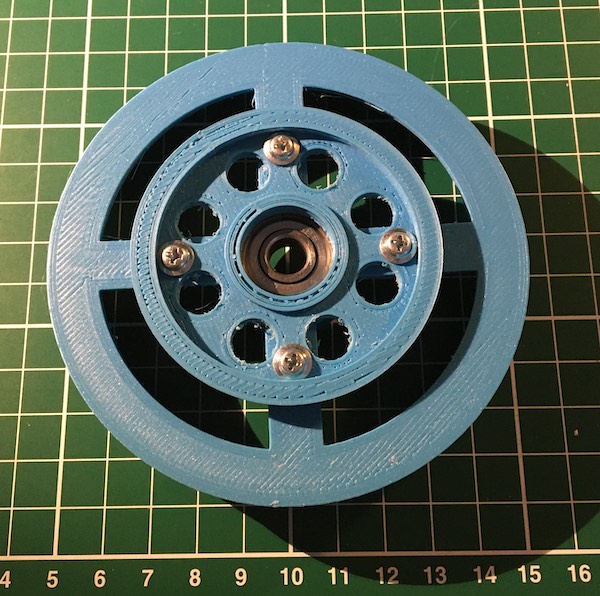
| Checking the alignment (modulus) of the belt and the 3D printed pulley |
I sketched out the arrangement of the bearings and spacers and axel. It is necessary to 'plug' the bearing into both the wheel/pulley. While redesigning this aspect of the wheel, I took the time to inspect the belt to make sure the pulley's teeth aligned with the belt. This is based on the modulus I calculated. It seems to match.
On the frame side, i repeated the bearing housing, creating a mount that holds the bearing but provides freedom for the axis. I am sure this will have another review in future robot designs. After printing, I will test out this new design.
 |
| Tilt - Wheel base design (in red) - OpenSCAD |
For the frame, I am still unsure what materials I will use for the 30cm between the wheel axel and the motor. since I do not know, yet, I designed a simple 3D printed frame with 10mm separate holes for M3 bolts. With this design I will have the flexibility to use anything, and just bolt that to the structure.
Next Steps:
The next steps are to print out the new design and assemble a single wheel for testing. this structure will allow me to clamp the wheel to the table and test the tension on the motor. I will be looking at how much backlash or slipping the belt will have.
The next physical design step will be to find a way to connect the motor mount to the wheel mount.
Update:
Here is the printed wheel mount. The scrap steel would not work very well. I currently lack the tools to shape it and bore holes through to attach to the motor mount.
I did have two rods of medium length from printers I salvaged. With the ability to print out parts, I printed a rod mount. The mount is adjustable using the rubber rollers that are already on the steel rods. (now i just need two more for the other side!)
 |
| A workable prototype for one side of the balancing robot |