Mojo4 has regressed in its ability to shuffle across the floor, unfortunately. This regression could be due to various causes. I have some concerns over the battery current and the condition of the battery given the temperatures and current. It is also obvious to me that the 'Franken-Prototype' nature is having an impact on the testing of the robot. It seems that the franken-prototype has taken the design as far as it can go, and an upgrade is necessary to continue forward. on to --
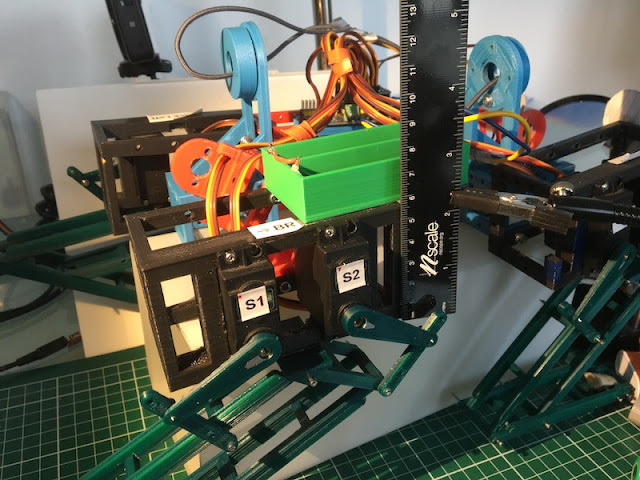 |
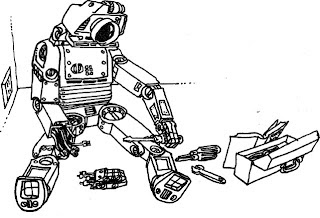
| Mojo4 - Robot is a mess, it needs a better frame or chassis |
De-Frankensteining
the majority of the robot is currently built with reused pieces. The is due to the focus being on testing how viable the legs will be for walking. Having (somewhat) proved this, the next steps need to have a more reliable robot platform. First on the list is to secure the 4 leg units with a better frame or chassis. I would like to do this in a way that any new parts, will be used in the future robot (as much as possible).
I will create some Frame Sections that will separate the leg modules, a provide a more stable chassis. Notice how the right side leg modules are actually not aligned with the rest of the robot - this will certainly have impact to the ability to have a precision walk.
Backward compatible - should not exist as a design constraint of a NEW robot in the prototype stage! But the question comes to mind. In order to only build the parts I need, I would need to ensure that the new replacement part fit the same configuration of the existing parts. This mean that the new part is 'backward compatible' with the older part. This, however, wold be a design sin at this stage. It would limit the innovation of the future robot, tying it needlessly to an obsolete part.
One note, since my parts tend to have regular 10mm spaced holes for M3 bolts, it does provide a lot of reuse potential. Unfortunately, i found that my previous designs, I was less concerned with 'standard' parts; therefore many of my old parts do not have regular dimensions (around the rounded cm values). This has limited my ability to reuse. Going forward I will be more careful to make sure parts I design fit into somewhat regular dimensions.
Frame Section:
I have designed a frame part that will help construct the prototype, while also being a useful part for the future build. This Frame Section is a box of 10cm x 6cm x 4cm dimensions. It will have M3 holes on the outside and a basic 'floor' for holding components (battery box, or Micro controller).

Frame Section - useful and reusable building component
If I print out 3-4 of these, then I can replace most of the frankenstein-prototype parts used to hold the leg modules in place. This should provide a more robot platform for testing the basic gait and servo strength.