Mojo5: Building a New Robot!
To kick off the design process, the main concept behind Mojo5 was to closely bind the servos together while using an unconventional material – chopsticks(!) – to create a minimalistic chassis.
Initial CAD Drawings:
The journey started with creating initial CAD drawings to visualize the robot's structure and mechanics.
 |
| Servo mount is binding the two leg servos together |
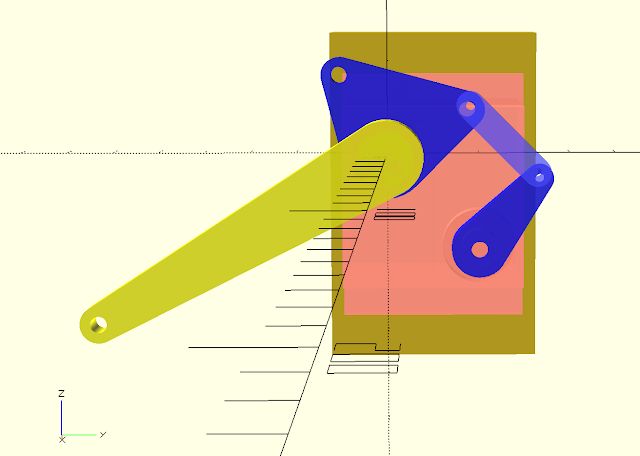 |
| (Blue) knee servo arm, linkage, and co-axial cam (Yello) Upper-Leg also co-axial, servo connected |
Microcontroller and Servo Driver:
For Mojo5, a major change was adopting the ESP32 controller instead of the simpler Arduino mini-pro used in previous Mojo variants. The ESP32 provides added functionality, including built-in Wi-Fi and Bluetooth connectivity, and ample I/O pins to accommodate future expansions.
 |
| Mojo5: ESP32 Micro-controller connected to PCA9586 Servo Driver |
To drive the servos, I chose the PCA9685 servo driver, utilizing I2C communications. Although my existing 11kg servos are not the most powerful, the PCA9685 still manages to control them effectively. Furthermore, my familiarity with this driver makes it a suitable choice for use with the ESP32.
The Franken-Prototype:
To quickly test the concept feasibility, an initial prototype was assembled. It consisted of a newly designed 'upper-leg' or 'femur' and a knee-cam sharing the same axis as the upper-leg. Other parts were recycled from earlier robots, giving birth to what we affectionately call a 'franken-prototype'. Franken-prototyping is a common and pragmatic approach to quickly determining the feasibility of an idea.
The first test was crucial – connecting the servos to the PCA9685 and ESP32. I taped the servos together and assembled the required components. Powering the system with a 5V source, I eagerly sought to witness the initial motion and validate the success of this build. And to my delight, it worked! This promising outcome lays a solid foundation for the upcoming design iterations.
 |
| Mojo5: Franken-Prototype |
In addition to the Prototype, I was able to set up a new repository for the Mojo5 code, and test out the basic set up, communications, and loops.
With Mojo5's initial movements validated, I'm excited to delve deeper into refining and enhancing its capabilities for even greater achievements in the future!
No comments:
Post a Comment